在全自動駕駛技術已成為全球科技業者視為掌握未來汽車市場最大商機的此刻,研發進展卻明顯遭遇到技術瓶頸,商品化落地時間表難以明確設定。這個瓶頸包括了各種車行環境下自駕系統的感測資訊正確度、車輛定位精度、衛星訊號無法接收狀況下的定位、與快速的最優化決策等等,都是全球研發人員急於突破的問題。而高精地圖在自駕系統中扮演的角色,正是為了彌補感測裝置蒐集資訊的完整度,並在車輛定位比對過程中,為系統決策提供安全冗餘(redundancy) 的保障。車未來的編輯團隊,在5月9日的下午,就來到了位於桃園市,3年前開始營運的虎頭山創新園區,拜訪國內首屈一指的高精地圖專家 - 勤崴國際,以進一步了解台灣高精地圖技術發展現況與對未來實現自駕技術落地時間表的展望。
 勤崴國際總經理黃晟中 (San Huang) 在接受訪談的過程中,首先對於高精地圖的運用,下了很簡潔清晰的註解⋯ 一般電子地圖是給人看的,而高精地圖是給電腦系統 “看”的。也就是說,道路模型的建立(車道線、車道中心線、坡度、航向、道路邊界類型與高度、⋯ )、與交通標誌、路面標誌、再加上GPS無法接收區域、道路即時施工狀態與即時交通壅塞路段的動態資訊等等,都是高精地圖製作與持續資料更新所需大量人力物力投入的原因。其精度同時必須達到內政部地政司規範的水平精度達20cm,3D精度達30cm以內。正因如此的嚴苛要求,在2009年開始就進入高精地圖製作領域的勤崴國際,在技術面縱使已成熟,但在公司營運面仍需分成幾個階段,以確保財務面操作順暢:目前以物流業、功具型運輸用途、或是封閉區域道路(例如工業園區)載人接駁的客戶為主,在可控的交通環境之內實施全自駕載運。至於中長期的個人全自駕用車 (例如RoboTaxi)運用,因需擴及全島的地圖繪製,則需自駕技術業者與車廠在未來的協力合作,方能畢竟全功。
勤崴國際總經理黃晟中 (San Huang) 在接受訪談的過程中,首先對於高精地圖的運用,下了很簡潔清晰的註解⋯ 一般電子地圖是給人看的,而高精地圖是給電腦系統 “看”的。也就是說,道路模型的建立(車道線、車道中心線、坡度、航向、道路邊界類型與高度、⋯ )、與交通標誌、路面標誌、再加上GPS無法接收區域、道路即時施工狀態與即時交通壅塞路段的動態資訊等等,都是高精地圖製作與持續資料更新所需大量人力物力投入的原因。其精度同時必須達到內政部地政司規範的水平精度達20cm,3D精度達30cm以內。正因如此的嚴苛要求,在2009年開始就進入高精地圖製作領域的勤崴國際,在技術面縱使已成熟,但在公司營運面仍需分成幾個階段,以確保財務面操作順暢:目前以物流業、功具型運輸用途、或是封閉區域道路(例如工業園區)載人接駁的客戶為主,在可控的交通環境之內實施全自駕載運。至於中長期的個人全自駕用車 (例如RoboTaxi)運用,因需擴及全島的地圖繪製,則需自駕技術業者與車廠在未來的協力合作,方能畢竟全功。
 車未來 (AutoFuture) 李應生社長 (左) 與勤崴國際黃晟中總經理 (右) 合影。
車未來 (AutoFuture) 李應生社長 (左) 與勤崴國際黃晟中總經理 (右) 合影。
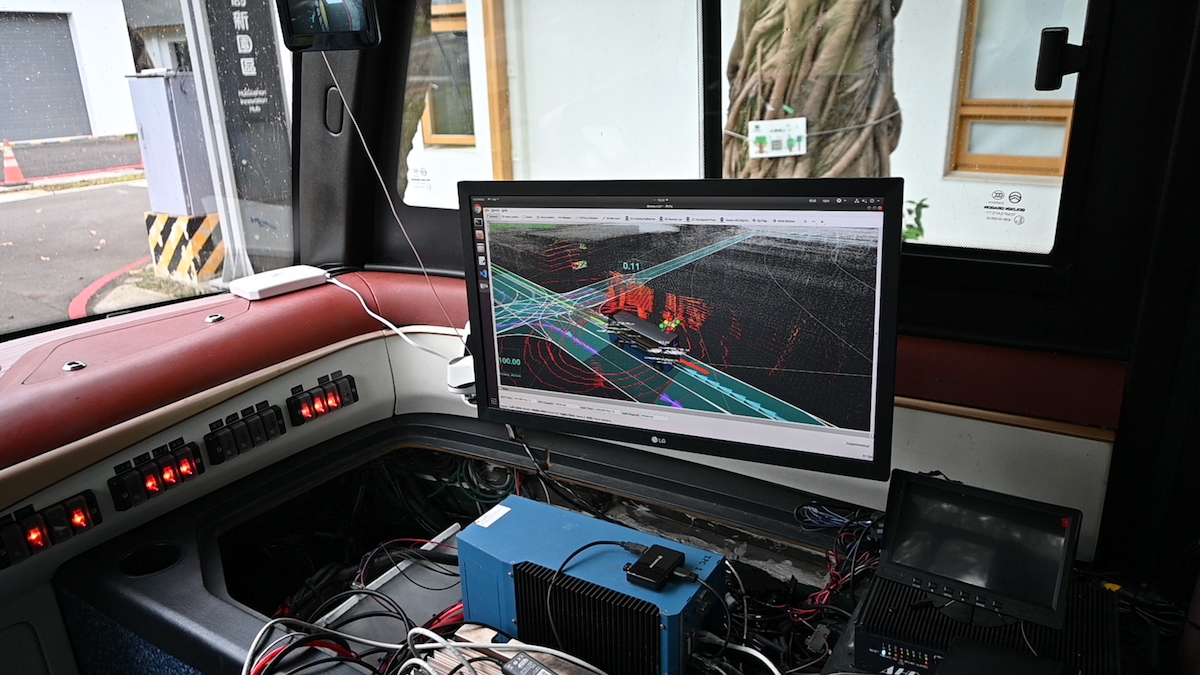
目前勤崴國際以配有光達與攝像機的路況資訊採集車來製作地圖,並藉由投資方中華電信的5G高速聯網功能,以大頻寬、低延遲、且可同時連結1000台車輛資訊的大連結(IoT) 功能特性,持續快速建置並更新圖資。在與全球知名的Google Map合作多年之後,勤崴國際在未來是否有機會能與其全球頂尖的自駕技術公司 Waymo有更多的商業合作計劃,著實令人期待。